Thanks for visiting this page. The content is a bit old and the page should be refurbished soonish.
Geometry Analysis
My principal research interest is the study of geometrics shape properties, with a strong focus on 3D acquired point clouds. I have developed during my PhD an approach called Growing Least Squares, which mimic the concept of Scale Space Analysis and extend it for unstructured point clouds. More details can be found in my PhD manuscript.
The GLS framework allows you to:
- Work with point sets: either 2D or 3D (and even 4D or more if you need it), the only (reasonable) requirement is to get the normal vectors associated to each vertex. Indeed, our approach is based on an efficient algebraic sphere fitting procedure valid in any dimension.
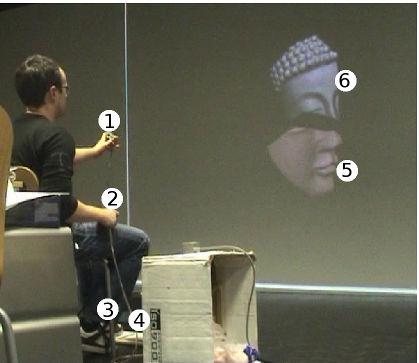
- Characterize complex shapes: the algebraic fitted sphere is represented by three different geometric quantities (e.g mean curvature), leading to a discriminative description even for complex shapes.
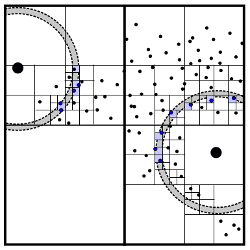
- Detect pertinent scales: a continuous geometric variation measure can be computed on the object to detect the pertinent interval of scales associated to each point. This information can then be used to for multi-scale shape matching.
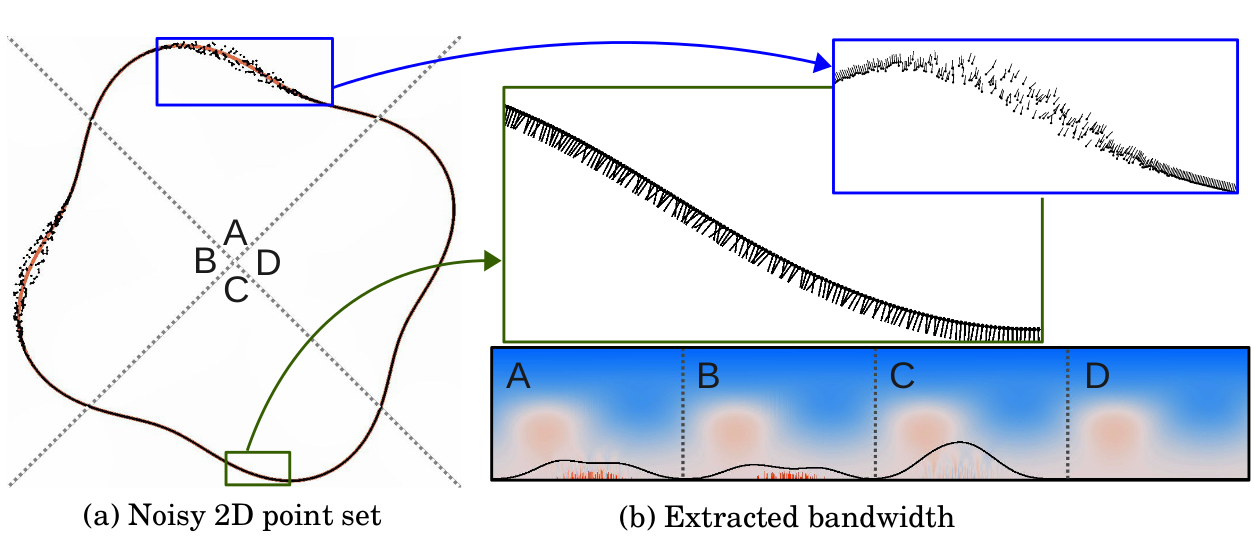
- Deal with acquisition data: usual acquisition noise can be handled by your approach thanks to the fitting procedure we rely on. And even better: heuristics can be developed to detect the correct scale that must be used to reconstruct the data and remove noise.
- Compute flows: the original approach has been extended (see details in my PhD manuscript) to compute continuous flows on point set surfaces.



(click on images for more details).
Source code is available through an open source library called