Registering multiple images of a scene acquired at different illumination wavelengths is a difficult challenge because the image appearance varies with diffent lights and because deformation may occur between image aquisition points.
Details and prerequisite skills: Existing code written in C++ will be a starting point for the project and other implementations for Matlab are available online. The project will require programming in Matlab and/or C++ and would benefit from experience and interest in image processing or computer vision.
Further reading:
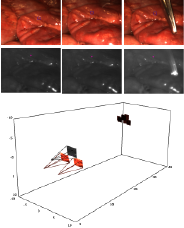
Recovering motion and 3D shape from videos usually requires solution to the correspondence problem. For surgical videos local approaches are effective for correspondence search as they can easily incorporate strategies to handle specular highlights, instruments and shadows. In this project the aim will be to investigate and potentially use machine learning techniques in order to improve best-first correspondence growing. An example of growing correspondence with this scheme is shown in the video on the left where we compute 3D structure from stereo starting with a set of sparse seed points. Improvements could be defined in terms of computational optimization, better reasoning or theoretically justifying growth decisions.
Details and Prerequisite Skills: Existing code written in C++ will be a starting point for the project and other implementations for Matlab are available online. The project will require programming in Matlab and/or C++ and would benefit from experience and interest in image processing or computer vision.

Tracking guide wires (GW) and catheters during endovascular procedures has many applications, including interventional navigation for accurate localisation within the vasculature and adaptive image enhancement of the GW for clearer visualisation during procedures. Accurate positioning of the GW and catheter with regard to the vasculature is a prerequisite for the successful deployment of stent grafts in procedures for aneurism repair and the treatment of atherosclerotic plaque. However, fluoroscopic image quality of the GW is usually restricted by restricting the radiation exposure of the patient, the use of contrast agent and the inherent physiological motion artefacts due to the heart cycle and respiration. Therefore GW detection, tracking and enhancement is an important but challenging task. This project will focus on the detection and tracking of catheters and guidewires from existing data of surgical simulators, phantom models and actual interventional procedures. Methods can be develop in Matlab or C++ and the most recent algorithms in this field use machine learning techniques so some background in the area would be helpful.
This project will focus on analysing instrument motion for understanding and objectively measuring operator learning curves and skill in Transesophageal Echocardiography (TOE) procedures. The tool motion will be recorded from an advanced simulation environment for developed by HeartWorks (http://www.heartworks.me.uk). TOE is now routine for monitoring cardiac function and surgical treatment in the operating theatre, as well as on the cardiac ITU. TOE requires the insertion of an ultrasonic transducer into the gastroesophageal tract and the correct manipulation of the transducer to visualise multiple planes through the heart. The HeartWorks simulator allows trainees to develop the core skills required for performing TOE examinations but currently the learning process and the relationship between the motion of the transducer and the skill of the operator is poorly understood. The aim of this project will be to investigate the rich information provided by the simulation environment in order to develop evaluation metrics that can provide real-time feedback during training and quantitative assessment methods. Development will initially be performed using Matlab and will involve a combination of signal processing techniques such as Dynamic Time Warping (DTW), dimensionality reduction algorithms like Principal Component Analysis (PCA) and machine learning techniques for classification.