Bayesian updating
Contents
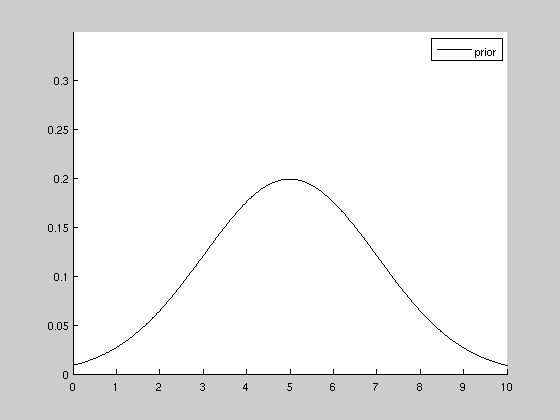
prior
x = linspace(0,10,1000);
figure; hold on; axis([0 10 0 0.35])
pm = 5; ps2 = 4;
prior = (2*pi*ps2)^(-0.5)*exp(-0.5*(x-pm).^2/ps2);
plot(x,prior,'k')
legend('prior')
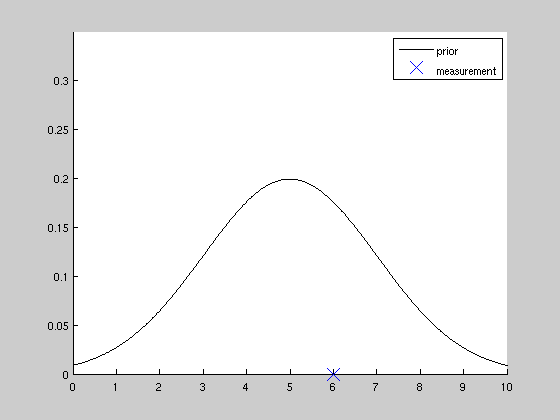
measurement/observation
lm = 6;
plot(lm, 0, 'bx', 'MarkerSize', 16)
legend('prior', 'measurement')
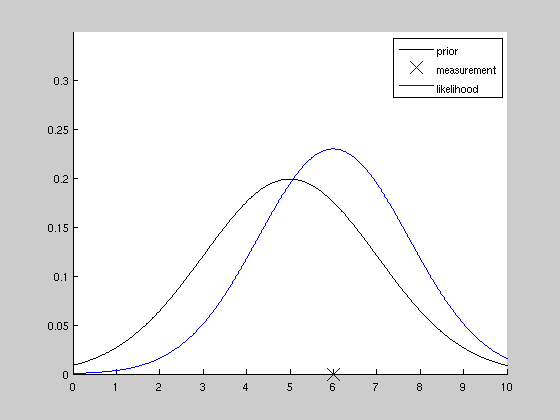
likelihood of measurement
ls2 = 3;
like = (2*pi*ls2)^(-0.5)*exp(-0.5*(x-lm).^2/ls2);
plot(x,like)
legend('prior', 'measurement', 'likelihood')
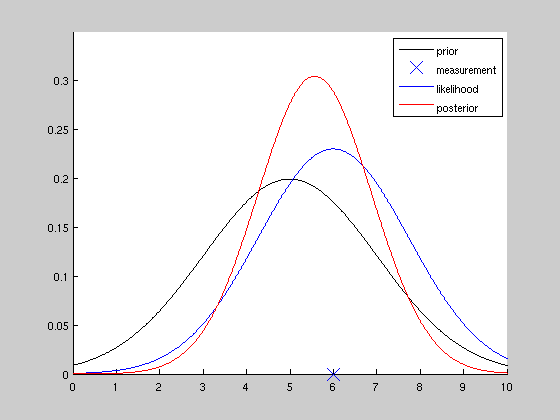
posterior
Ps2 = (1/ps2 + 1/ls2)^(-1);
Pm = Ps2*(pm/ps2 + lm/ls2);
posterior = (2*pi*Ps2)^(-0.5)*exp(-0.5*(x-Pm).^2/Ps2);
plot(x,posterior, 'r')
legend('prior', 'measurement', 'likelihood', 'posterior')