Evolving Hand-Eye Coordination for a Humanoid Robot with Machine
Code Genetic Programming
W. B. Langdon
and
Peter Nordin
Paper
in
EuroGP2001
Elvis Robot Hand-Eye Coordination
mpeg 690k
YouTube
Movie clip showing Elvis using his stereo vision to locate
a target (indicated by bright red spot) and move his index finger to it.
Two target points are shown. In the first he places his finger within
a few centimetres
from the target. In the second, his finger collides with the
target.
He had less success with a few target points, such as those at the
extremes of his stereovision.
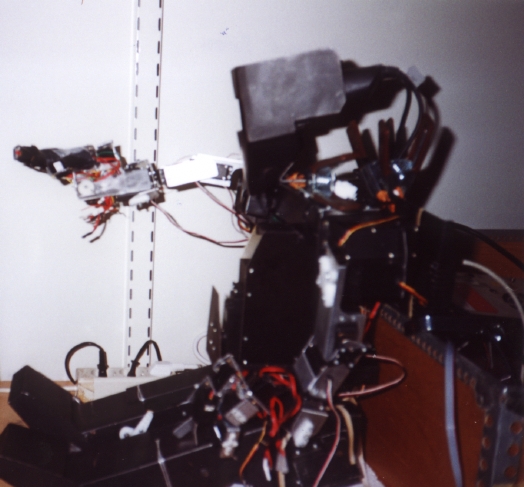
Picture of Elvis
Elvis is a 60cm prototype of a full scale humanoid robot.
Picture of Elvis.
Many pictures of Elvis and Priscilla.
Elvis is now in the
science exhibition Universeum
in Goteborg.
BBC
newstory of
Priscilla at RoboCup.
30 Sep 2002 Elvis listed as Nasa
cool robot of the week
Collecting the Training data
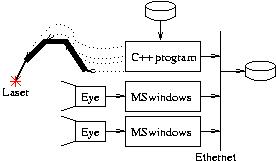
Collection of Training Data.
Data driven C++ program waves arm in front of robot's eyes.
Both arm commands and apparent position of Laser are logged to disk.
Moving to Target
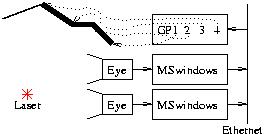
GP driving robot arm.
The robot's eyes feed the apparent position of the target
(indicated by the laser)
to 4 GP
programs which together drive the arm to the laser.
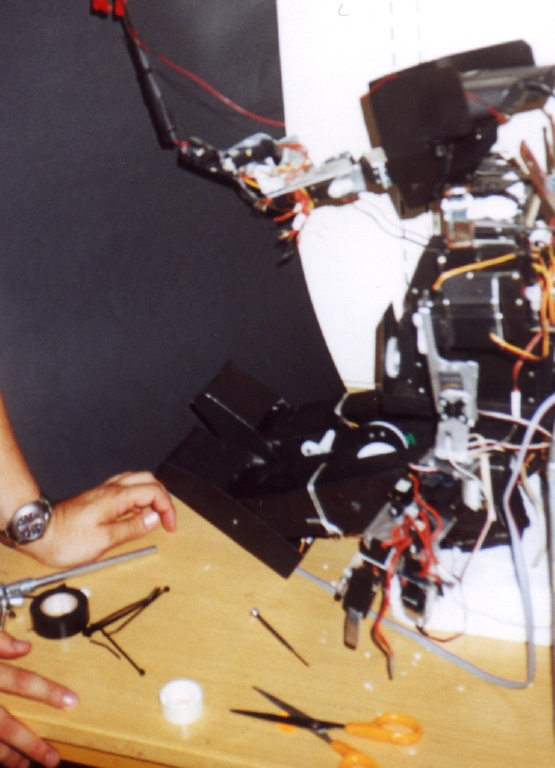
Robot finger tip
(bright red dot)
driven by GP to target laser (bright red dot on vertical mount).
Finger Tip and Target Lasers
 Identical mountings were used for both finger tip and target lasers.
A spherical translucent glass bead (pink)
is mounted directly in path of red light (dark red)
emitted by a solid state laser (short black rectangle).
To shield the direct light and so reduce reflections,
the whole is mounted inside a brass tube (approximately 6mm
in diameter by 10mm in length).
Identical mountings were used for both finger tip and target lasers.
A spherical translucent glass bead (pink)
is mounted directly in path of red light (dark red)
emitted by a solid state laser (short black rectangle).
To shield the direct light and so reduce reflections,
the whole is mounted inside a brass tube (approximately 6mm
in diameter by 10mm in length).
Acknowledgements
Special thanks to Manne Kihlman and
Marcus Tallhamn, who did excellent work in developing the hardware design
for Elvis. Per Svensson, Bjorn Andersson, Rikard Karlsson, Thorbjorn
Engdahl, Anders Eriksson and Christopher Graae have also made significant
contributions to various parts of the project.
Funded in part by
the Wennergren foundation,
Swedish Business Development Agency -
NUTEK
and TFR.
W.B.Langdon
22 August 2001
(last update 7 June 2013)