|
I am a Senior Research Engineer at Google where I work on real-time 3D reconstruction and neural rendering. Before that I spent some time at Niantic and Skydio where I worked on depth estimation using deep neural networks. I did my PhD at UCL with Gabe Brostow where I worked on monuclar depth estimation. I got a MSc in Computer Vision and Graphics from UCL and an MEng from Supélec. I also spent a summer at Google Seattle working on Jump and another summer at Facebook Seattle working on burst denoising using deep learning. |

|
|
I am quite interested in the intersection of computer vision and graphics. |
|
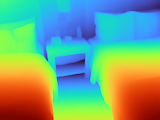
We built a fast and accurate multiview depth estimator for monocular videos. |
|
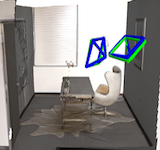
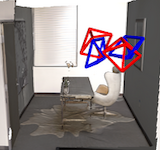
We use audio sensing to improve the performance of visual localization methods on three tasks: relative pose estimation, place recognition, and absolute pose regression. |
 
|
We dug deeper into self-supervision for monocular depth estimation and improved on monodepth. |
 
|
We trained a recurrent neural network to denoise bursts of images. |
 
|
We trained a fully convolutional neural net to infer single frame depth only using stereo pairs as training data and beat supervised methods on KITTI. |
 
|
We reconstruct mirror-like objects from two dozen images in uncontrolled environments, while handling inter-reflections. |
|
|