


|
Technologies |
|
ReaCTor: Is a room in which the user is presented with high-resolution stereo-pair images projected in real-time on 3 walls and the floor. The floor space is 3m x 3m and each of the 3 walls is 3m x 2.2m. The floor is painted wood and is projected from above, while the 3 walls are acrylic and back projected. The 4 projectors are Barco 808's, modified by SEOS to allow accurate geometrical alignment of the edges, colour convergence of the 3 beams, and colour and contrast blending. Each projector outputs a 1024x768 image at 90 frames/sec (alternate left-eye and right-eye views are sent so the frame rate is 45Hz for each field); the projections are reflected off Mylar mirrors ("folding" the projection to save space). Crystal eyes shutter glass emitters are mounted behind each screen to provide the IR synch signal for
the shutterglasses.
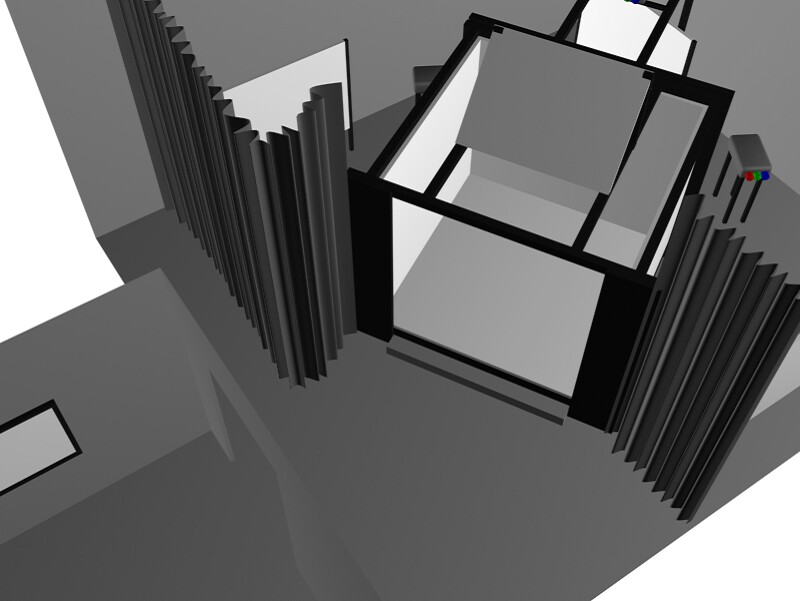 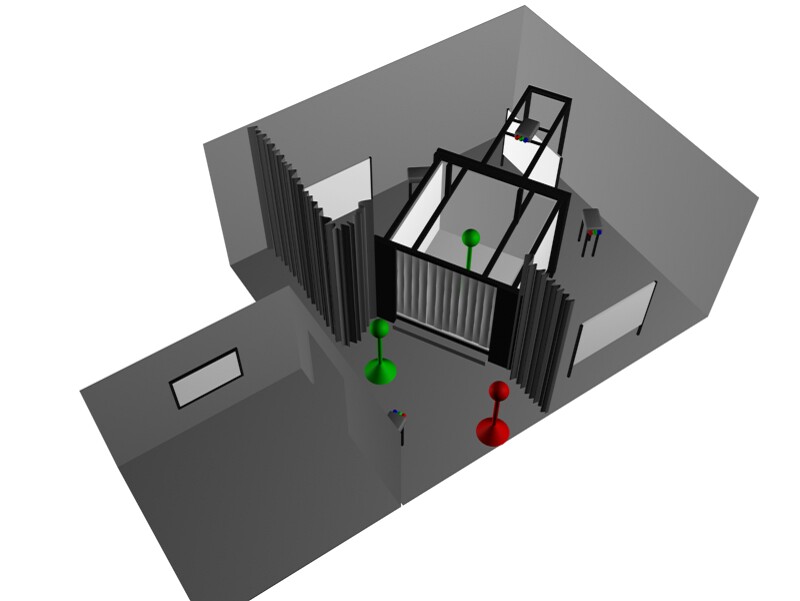 Picture of the UCL ReaCTor (left) and after addition of a traversable screen for an early City Workshop (right) More Information
DIVE:
UCL has worked with the Distributed Interactive Virtual Environments
(DIVE) system from SICS for many years. We have ported it to the
ReaCTor system and a variety of other immersive and semi-immersive
systems. Most of our scalability and humanoid animation demonstrations are built in DIVE.
Crowd Rendering: We are further developing the crowd rendering system for use within the Digital Care, City and CityWide projects. Virtual City Models: We are developing modeling and rendering process for very large urban models. Refer to the Virtual London page for more details.
Animated Avatar Models:
We are developing and modeling virtual humans and appropriate virtual behaviours for our virtual friends. Refer to the brochure for more information [PDF] or the general website [HTML].
|